![]()
![]()


PyThrust is an open-source framework for electric propulsion system analysis, co-design, and parameter optimization in UAV applications. It can be used for multidisciplinary design optimization (MDO) within OpenMDAO. It includes steady-state performance solvers, auto-tuning calibration tools to fit manufacturer test data, and database search tools to map theoretical designs onto real-world brushless motor and propeller catalogs.
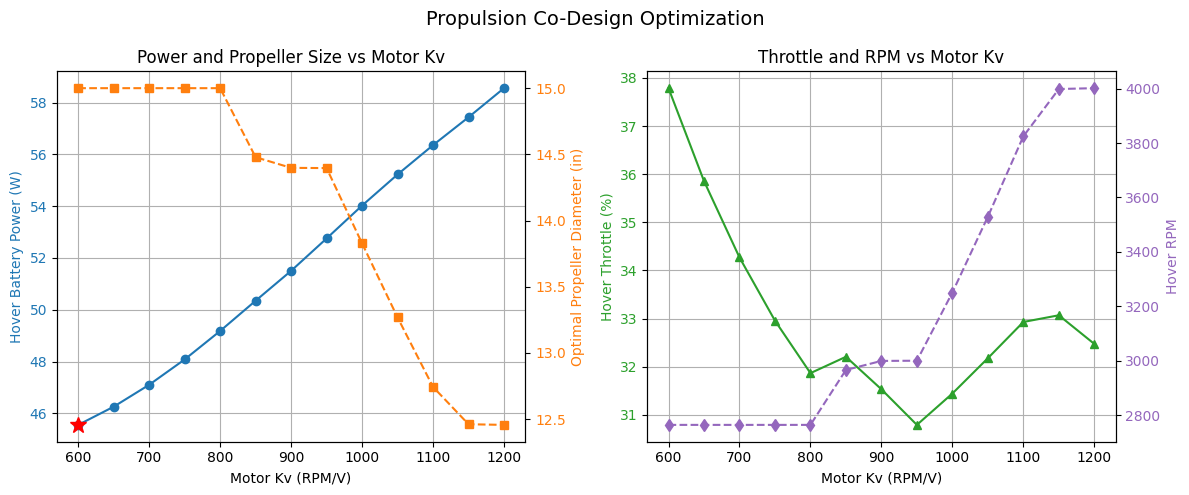
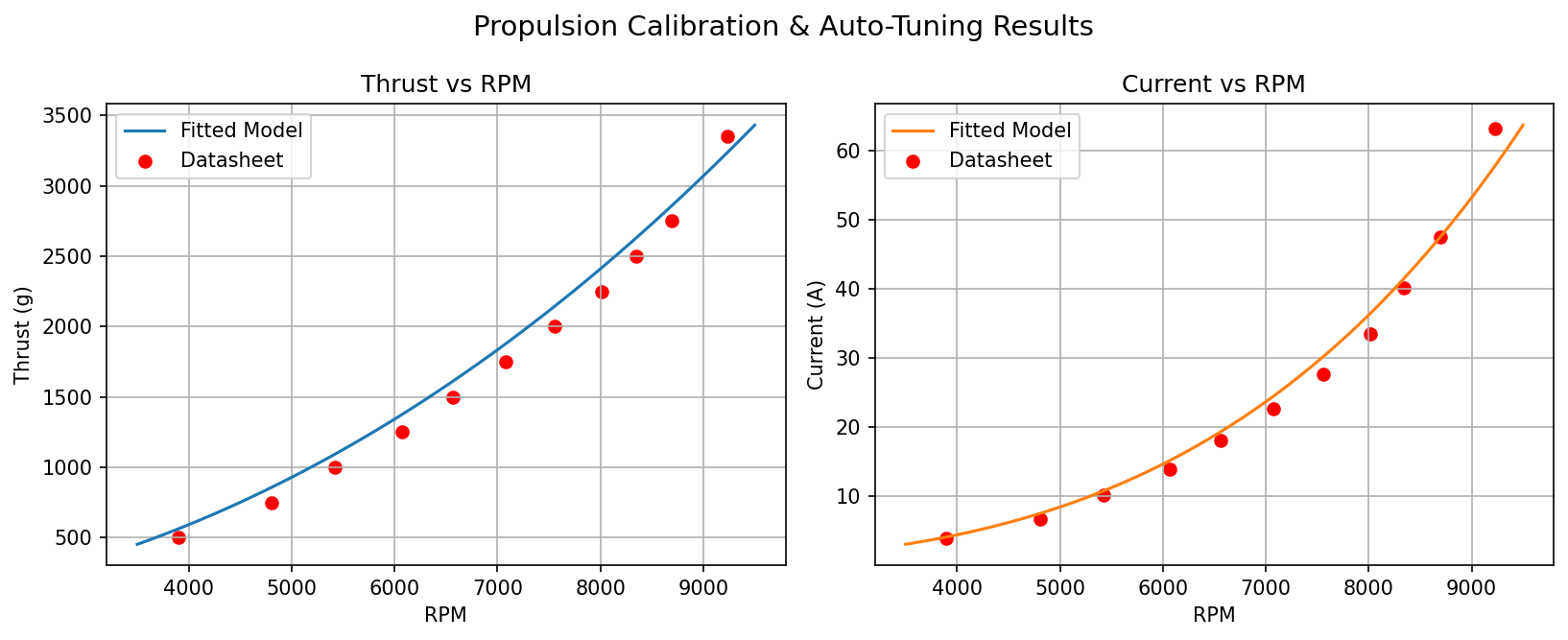
| 1. Propulsion Co-Design Optimization | 2. Propulsion Calibration & Auto-Tuning |
|---|---|
 |
 |
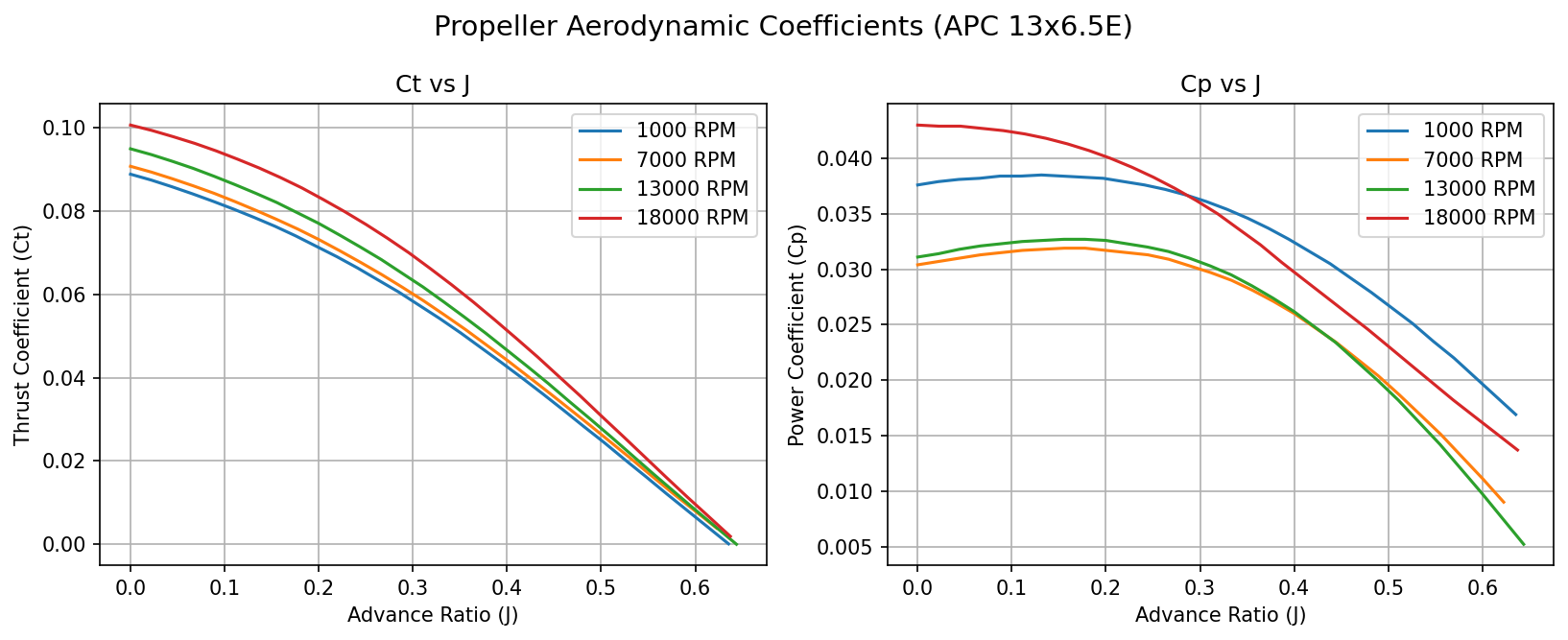
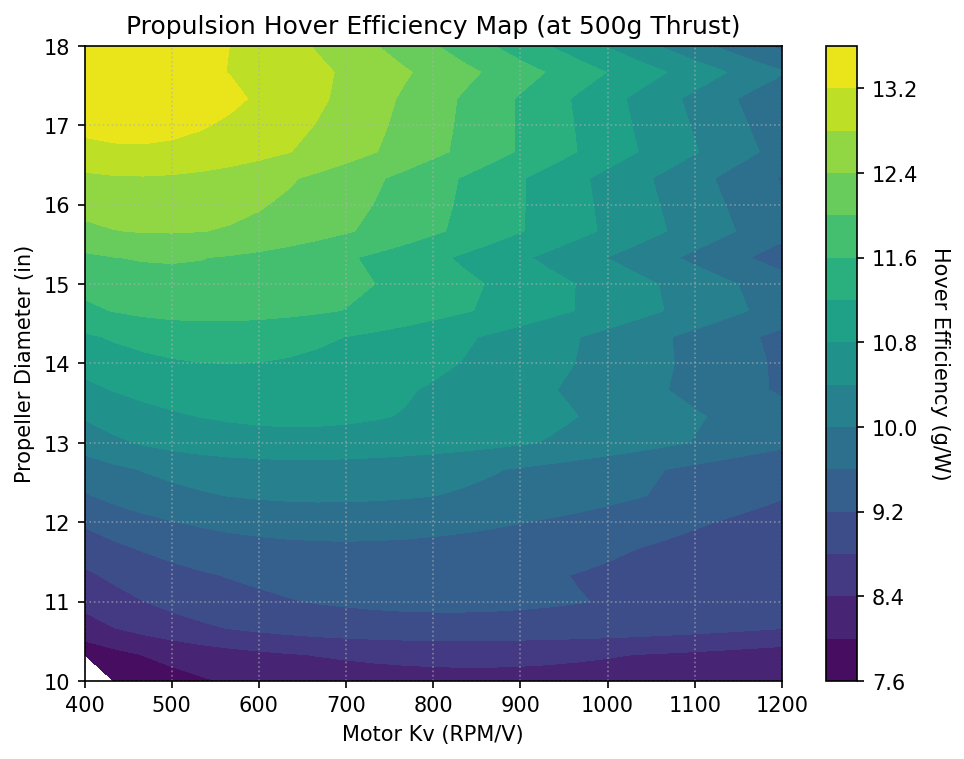
| 3. Propeller Aerodynamic Coefficients | 4. Hover Efficiency Heatmap |
 |
 |
The full documentation is available at:
https://setuav.github.io/PyThrust/
Key sections:
PyThrust is licensed under the Apache License, Version 2.0 (the "License"). See LICENSE for the full license.
Copyright (c) 2026 Setuav. All rights reserved.